Etude de la couche physique du CAN
Etude de la couche physique du CAN

Un bus de communication a donc souvent pour support physique deux fils torsadés. Ces fils sont nommés CAN high et CAN low.
Nous avons donc affaire à une transmission série asynchrone (il n’y a pas d’horloge commune aux différents calculateurs) par paires différentielles (il y a deux fils dont on soustrait les tensions pour obtenir la valeur du bit transmis).
Pour diminuer le risque de défaut de transmission, des dispositions ont été prises au niveau la couche physique :
- la transmission est réalisée sur deux fils (nommés CAN high et CAN low) ;

- la somme des tensions est toujours constante quel que soit le niveau logique (le bit) transmis.
Il existe deux types de protocole CAN :
- CAN Low Speed : pour des vitesses de 40kbits/s à 125kbits/s
- CAN High Speed : pour des vitesses allant jusqu’à 1Mbits/s
NB : c’est le type de transceiver utilisé qui va différencier le type de protocole CAN low speed ou high speed (détail plus loin).
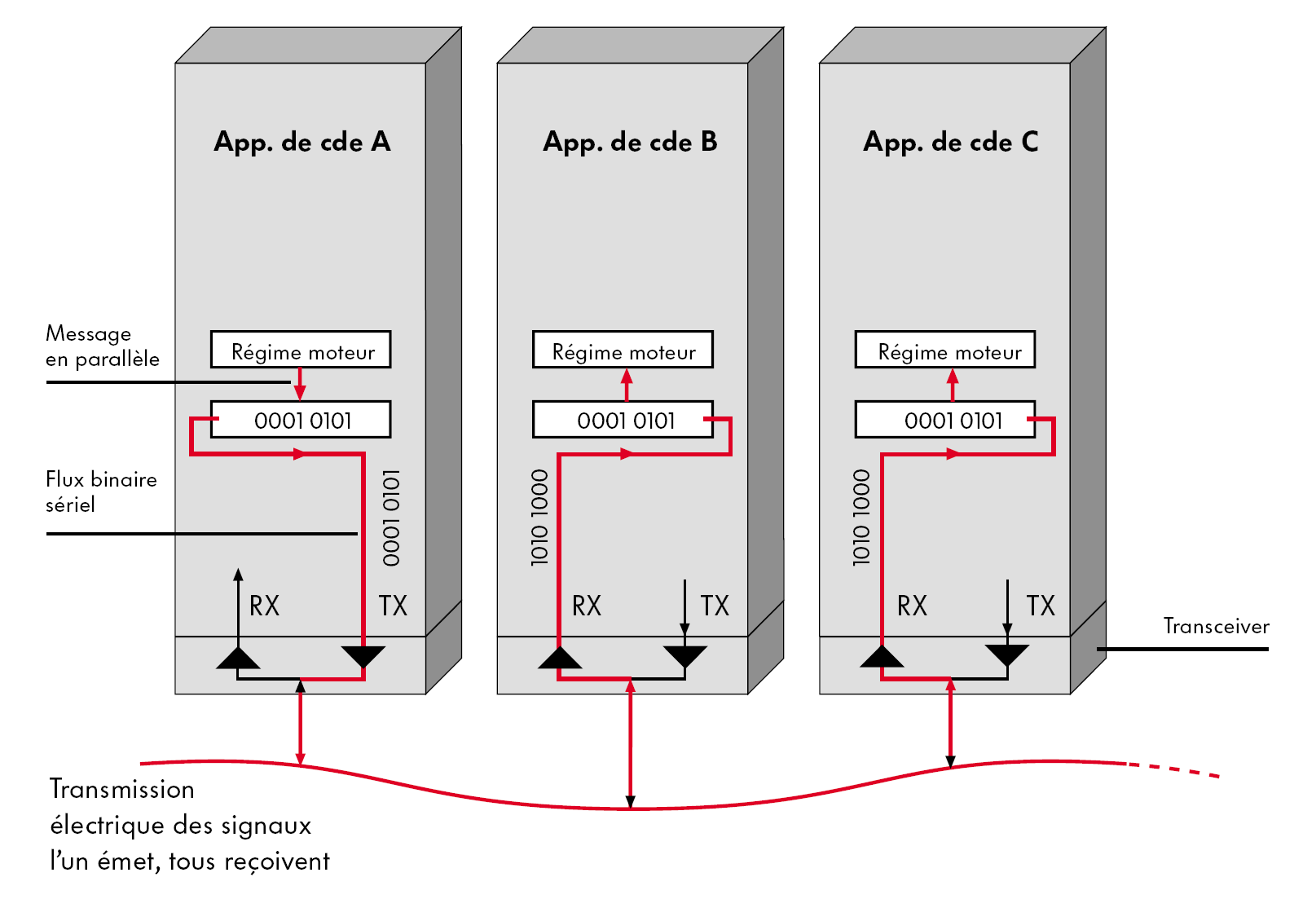
Tous les calculateurs présents sur un réseau sont reliés par les modules émetteur/récepteur intégrés dans les calculateurs. Chaque calculateur connecté est appelé un nœud.
Créé avec HelpNDoc Personal Edition: Créer des documents d'aide CHM facilement