Processus d'échange de données
Processus d’échange de données
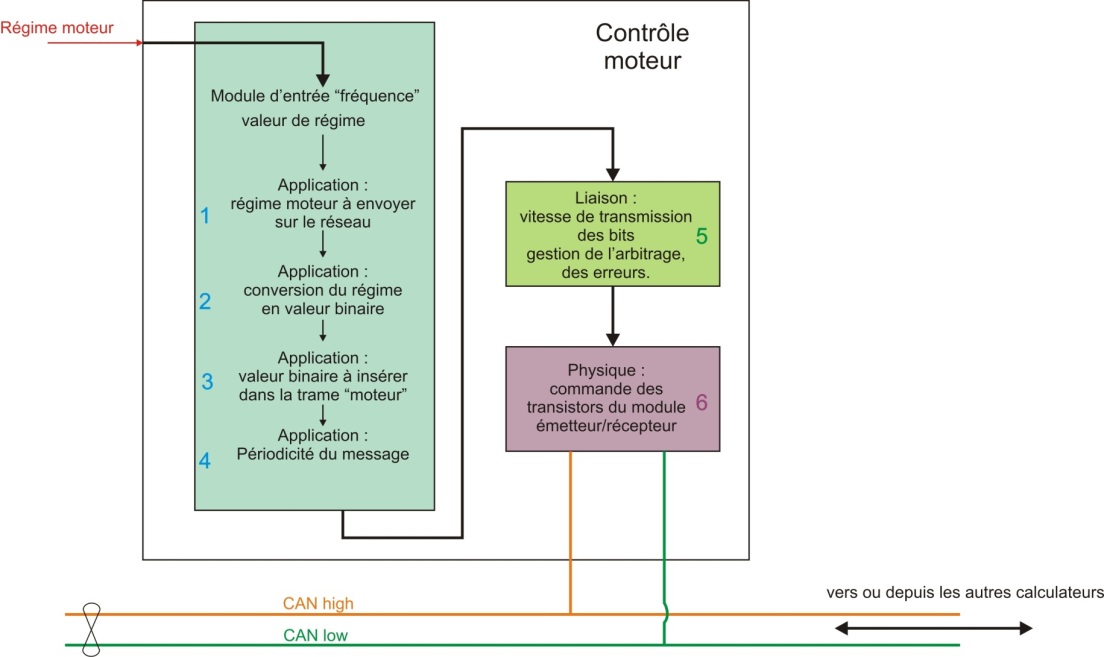
Le processus d’échange de données fait intervenir les différentes « couches » citées ci-dessus. Prenons l’exemple de la transmission du régime moteur :
Le calculateur de contrôle moteur acquiert la valeur du régime depuis le capteur de régime connecté à ces bornes.
- Cette valeur peut être exprimée en tr/min, donc en valeur décimale.
- Le régime moteur est ensuite converti en valeur binaire dans un format choisi par le concepteur du protocole utilisé.
- Cette valeur binaire est positionnée dans un message défini par le concepteur du protocole qui peut contenir d’autres informations (température d’eau, position de la pédale d’accélérateur, …). On l’appelle la trame de données moteur 1 (par exemple ou trame dynamique moteur, ou trame EEC1-E, …).
- Une fréquence de transmission de ce message est définie par le concepteur (dans ce cas la trame est périodique : envoyée régulièrement toutes les 10 ms).
- Ce message est alors transféré au module de commande CAN (interne au calculateur). Ce module de commande gère les arbitrages, les défauts de transmission, la déconnexion du bus.
- Le module de commande transfère alors le message (toujours binaire) au module émetteur/récepteur qui le transforme en tension électrique sur les fils CAN high et CAN low.
NB : les points 1 à 4 sont définis dans le cadre de la couche application.
Le point 5 est défini par le contrôleur CAN et est intégré dans la puce. Il est défini par la couche liaison.
Le point 6 est également intégré dans une puce et est défini en partie par la couche physique.
Créé avec HelpNDoc Personal Edition: Écrire des livres électroniques ePub pour l'iPad